a drop in the digital ocean
Welcome to my little drop in the digital ocean. I'm currently in the process of porting over to Jekyll; so with this in mind things may be a little broken here and there! Rest assured that im working on it; the good news is that all the old content is still available ...its just a little messy :) It's also been around 6 years since I last blogged regularly so I'm a bit out of practice! Please be patient whilst I get back into the flow of things again :)

recent posts
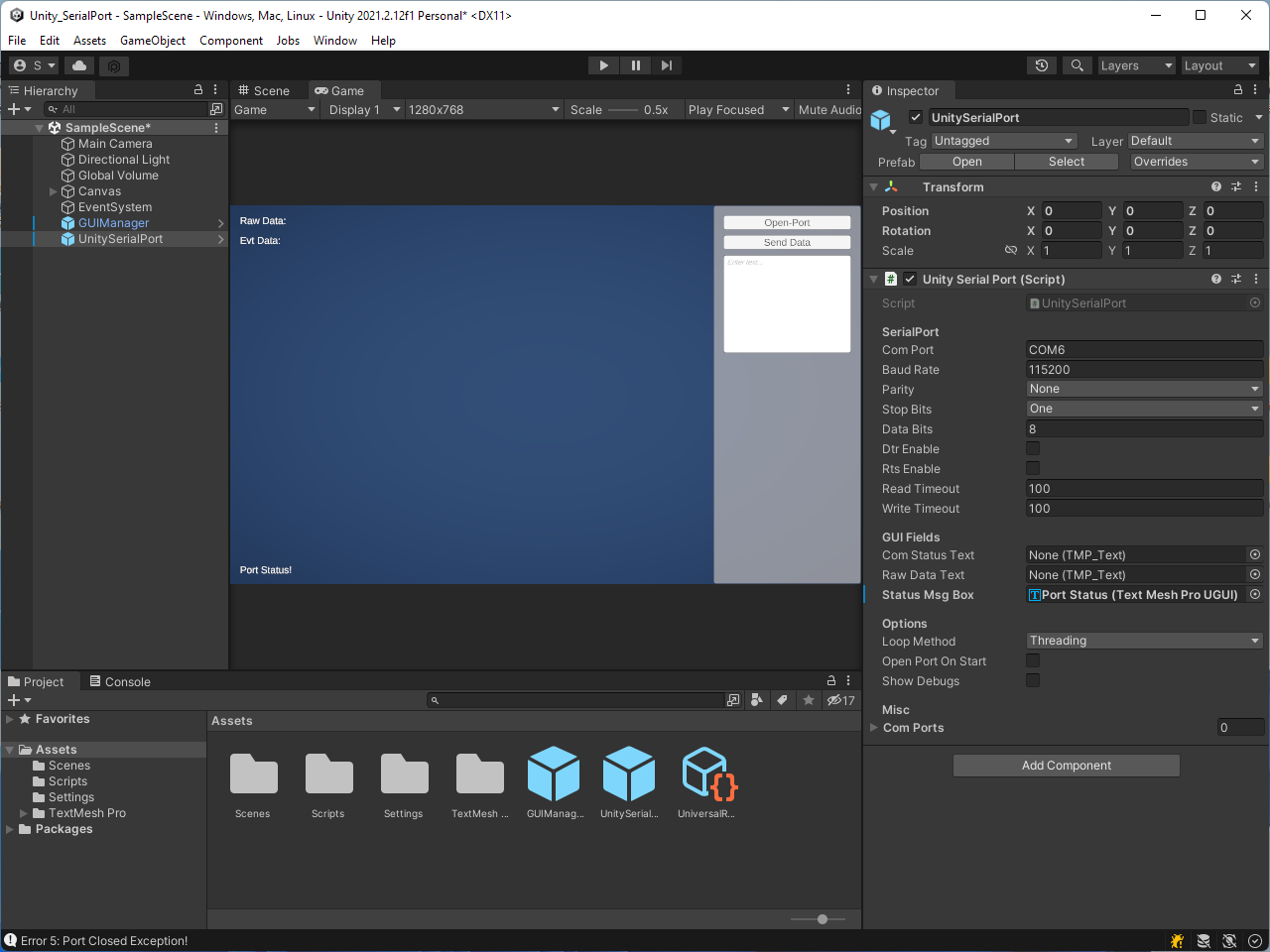
Updating the Unity_SerialPort Script
In this post I detail the recent updates to my project for serial-port communication within Unity 3D...
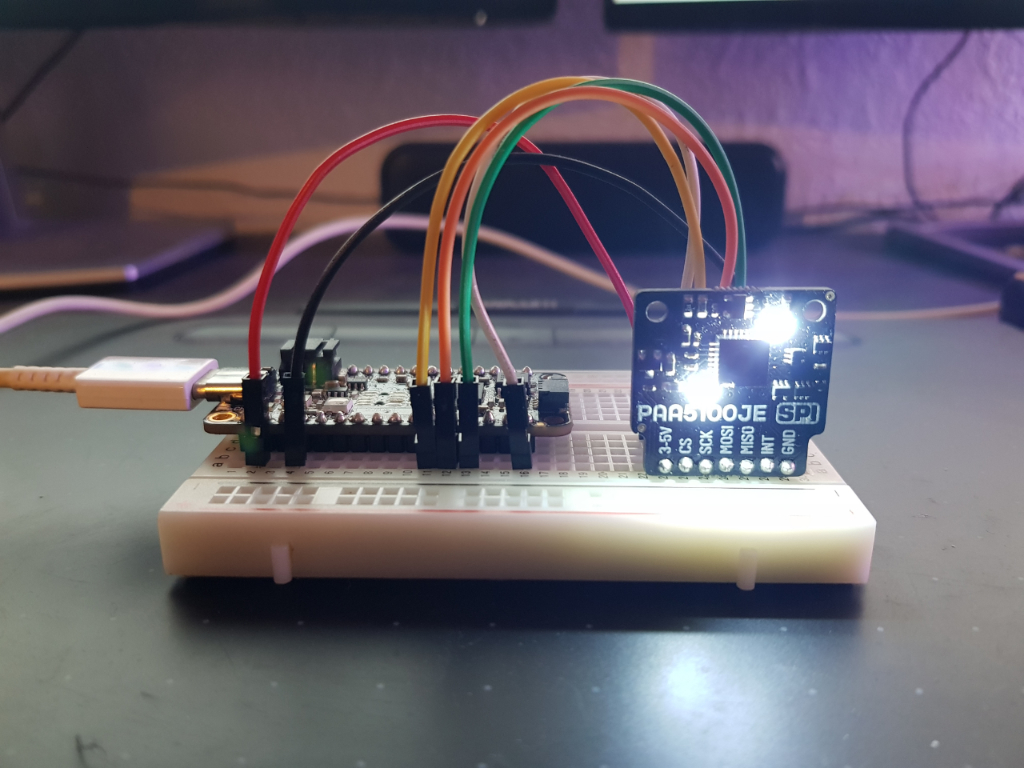
A Circuit-python Library for the PAA5100JE
I've recently been playing around with the Feather RP2040 board for a new project. In order to use a PAA5100JE sensor with the board I needed to port...
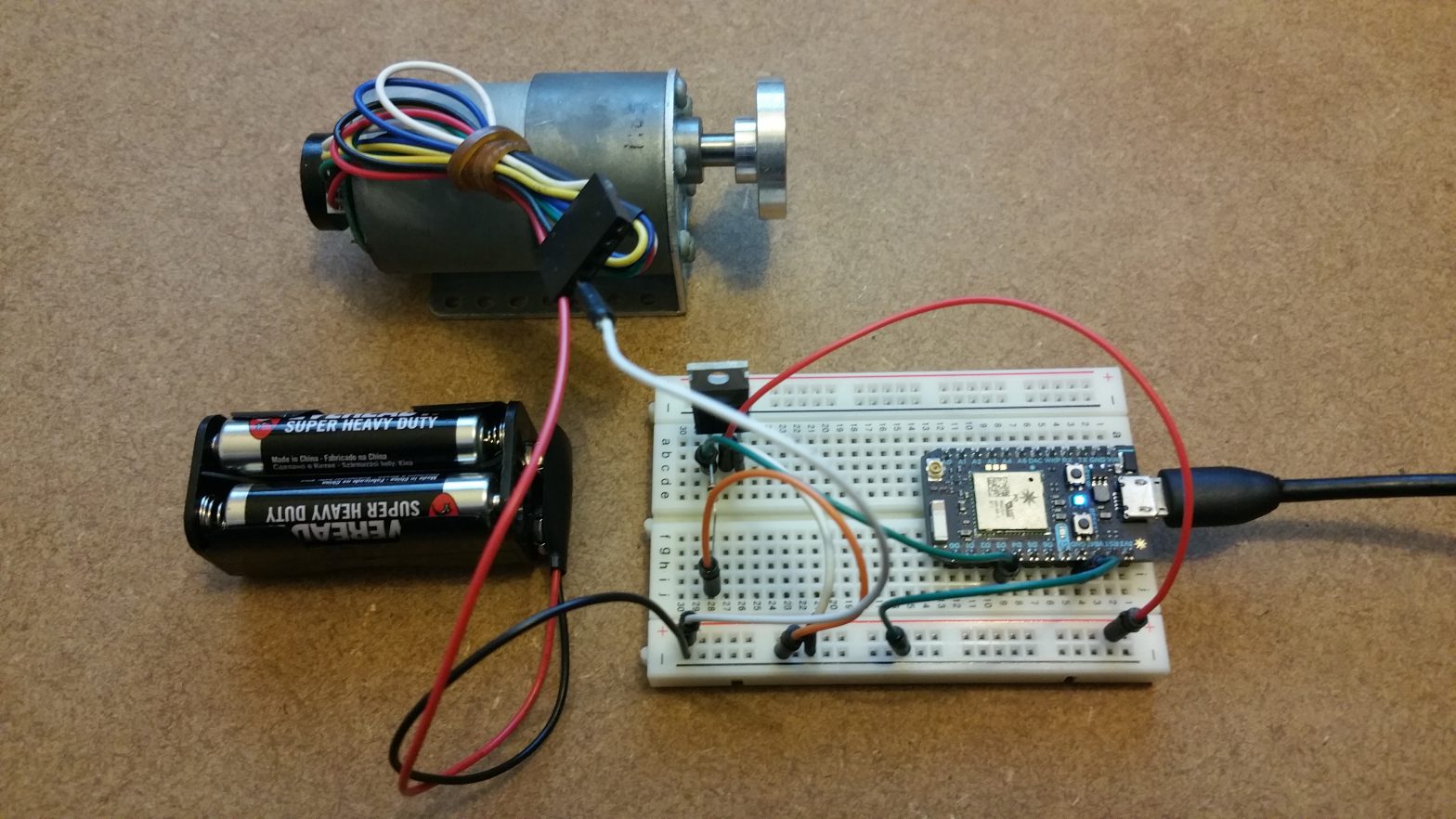
Photon Control of a MOSFET
This tutorial builds upon both the code base and circuitry as developed with the Particle.publish() and Particle.subscribe() example. This time around instead of registering a subscription that can be used to...