The Cruciferous Vegetable Amplification
For those of you not in the know: “The Cruciferous Vegetable Amplification” is the second episode of the fourth season of the American sitcom The Big Bang Theory. Within the episode one of the main protagonists (and my personal favourite),Sheldon Cooper works out that he won’t live long enough to download his consciousness into a robot body, and by way of result he then attempts to extend his lifespan by changing his diet and then developing the Mobile Virtual Presence Device (MVPD, fig 1).

Fig 1: The MVPD
Inspired by this televisual extravaganza I decided to build my first robot Sheldon (fig 2), the plan was to build a little robot that had a screen that I could drive around remotely just like the one in the show. However as the build progressed I ended up with what some call a WALL-E style robot which had highly Kinect influenced functionality (Sharp IR sensor & wireless camera) which I could use for rudimentary point cloud driven autonomous and remote navigation.
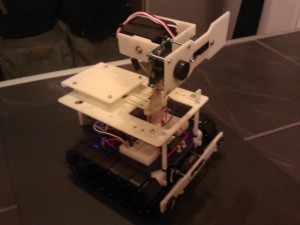
Fig 2: Sheldon the wonder bot
Well today as I was doing a little more Ratchet development I thought why not go back to the original concept and add a screen to the design. With this in mind I set about developing a mount that could hold one of my spare mobiles (simple screen and camera source).
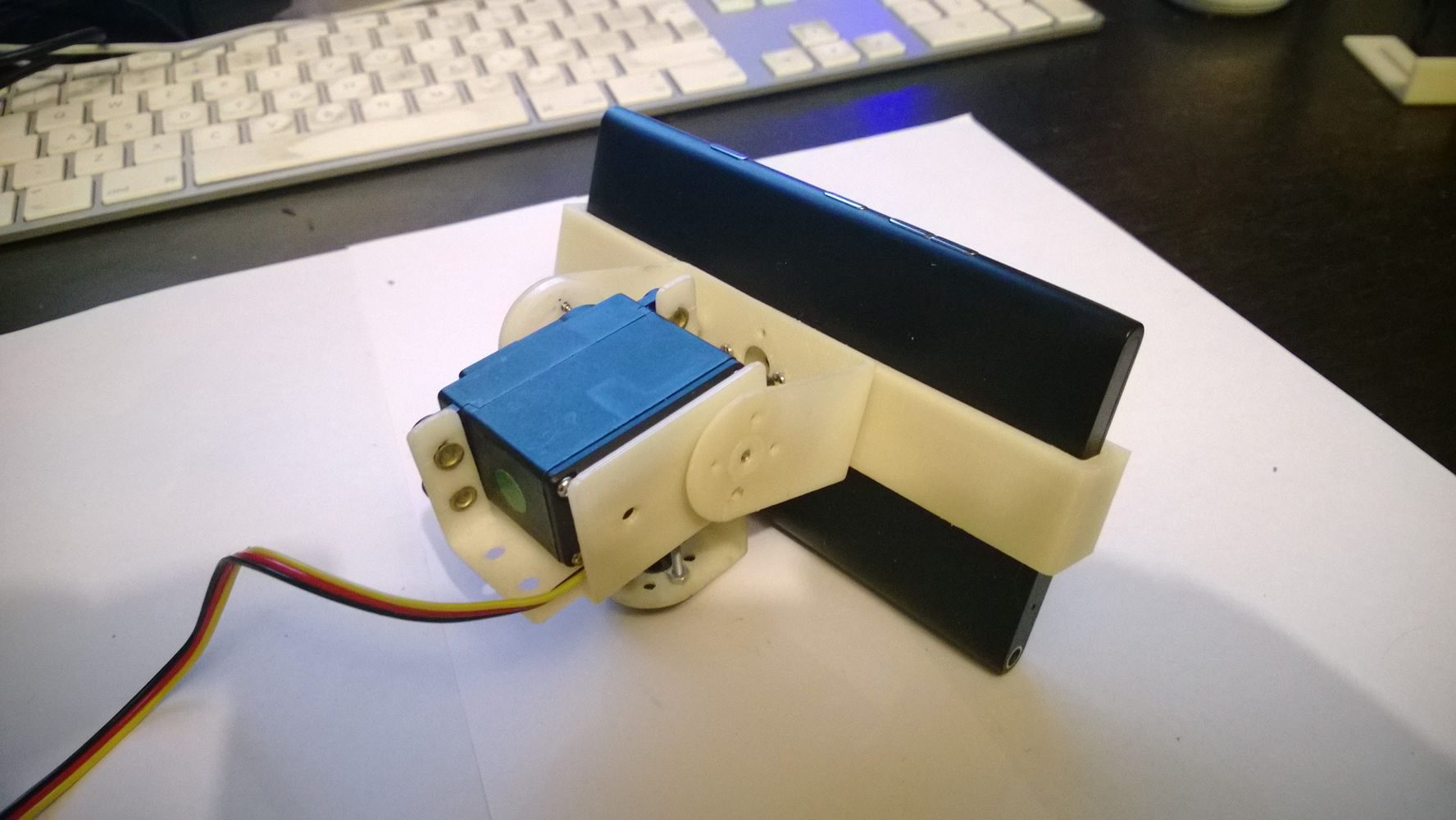
Fig 3: Back view of the mounting clip
Both images 3 and 4 show what I came up with. As you can see the mount is nothing more than a simple clip that can be bolted on to the existing headstock. The images show the clip with a Nokia 900 attached, however the clip also easily caters for the slightly larger 920.
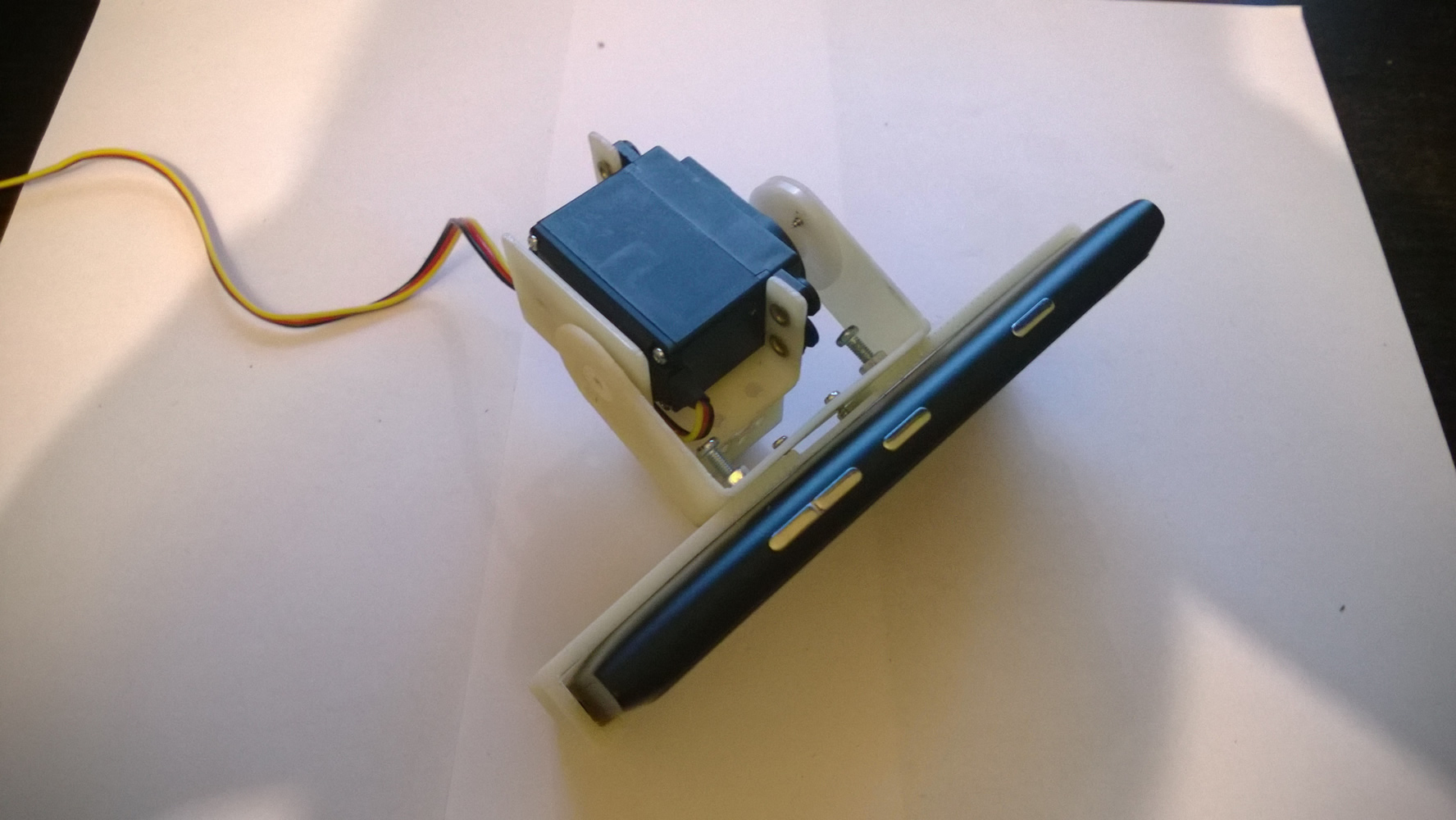
Fig 4: Top view of the mounting clip
The major concern at this stage was that the servos would not be strong enough to support the weight (especially of the 920). However before I mounted the head in situ (fig 5 & title) I ran the simple servo test script on the headstock just in case. Luckily the servo handles the weight without any issue so I continued to mock up the final build (fig 5).

Fig 5: The completed phone screen mock build
I’m not to sure about the two bits jutting out from each side of the phone but believe that they wont be too prominent once the mount is sprayed up. I am also thinking that I can utilise these surfaces to mount some additional sensors, such as two mini mikes (real ear’s eh), but only time will tell.
Tomorrow I plan to add & wire up two Sharp IR sensors, one at the front and one at the back. With this done it will be time for a respray and final assemble of the main body unit.